Important: I’m thinking out loud here! The title is a question because I don’t have answers and am not proposing anything.
Now that we have scooters sharing bike lanes, I wonder if we’ll need to think more clearly about the different kinds of lane on a street and what their real defining features are. This could lead to different words.
We separate traffic types for two reasons:
- Speed, so that faster vehicles aren’t often stuck behind slower ones,
- Width, so that we use less space to serve the needs of narrower vehicles, thus using scarce space more efficiently overall.
Sarah Iannarone and I were chatting about this on the bus this morning, and after that she went straight to the whiteboard and drew this:
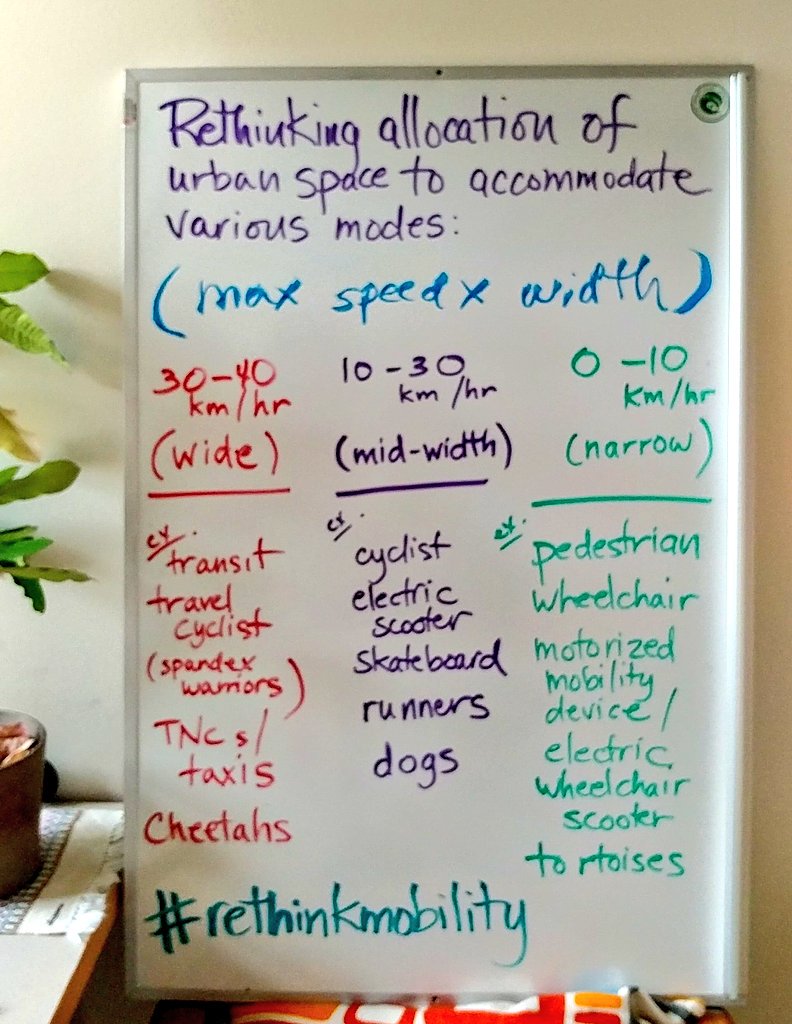
The idea here is that a street with a speed limit over 30 km/hr will need to separate these three kinds of traffic, because they differ in both speed and width. At lower speeds you can mix them more.
Where speed and width come apart, however, speed has to be the defining feature. You can’t ride a motorbike at 30 km/hr down a “bike” lane, even though it may be narrow enough. You have to ride it in the traffic lane, even though that’s a waste of space.
All this came up because I was trying to think of the correct new term for “bike lane” as we proliferate more vehicle types that run more or less at the speed and width of bicycles but are clearly not bicycles, such as electric scooters. The two logical terms seem to be narrow lane or midspeed lane. One way or another the two concepts will need to track with each other.
I wonder if this kind of language can make our sense of the role of these lanes more flexible, and thus less divisive.
There is a lot of room for individual choice here about which lane to use. Cyclists, for example, already choose between midspeed “bike” lanes and full-speed traffic lanes, depending on their preferred balance of speed and safety. Meanwhile, an 8-year-old learning to ride a bike should probably be on the sidewalk. Another reason that “cycle lane” may be a misnomer.
This isn’t easy. The things that might go in a midspeed lane have very different acceleration and stopping characteristics, all of which will cause friction. When I raised this thought on Twitter, I got lots of responses expressing concern about different kinds of vehicles sharing a lane. But even with just the few lane types that we already have, it’s hard to make them all fit. We’ll never have a separate lane for every type of vehicle that needs a slightly different speed, acceleration, or stopping distance. So again, I’m asking a question, not answering it.
Finally, Sarah assigns transit to the full-speed, widest lanes, but of course that leaves open the question of transit priority within that territory. Where there’s demand and room for a bus lane, it should be automatic in my view. It doesn’t even need to be “constructed” necessarily. Just paint the lane red.
One problem I see with that mid-width lane is that it needs to be wide enough to allow mid-width vehicles to pass each other. Here in Tempe, AZ, as a cyclist I often end up behind a skateboard in the heavily trafficed bike lane near the university; the skateboard is traveling much closer to 10 km/h, and my desired speed is close to 25 km/h. Runners in the mid-width lane would create the same issue.
Agreed. The Bicentennial Bikeway in Brisbane was widened and separate paths provided for walking only about 6 years ago, but it is already quite busy every morning and on weekends. Much busier than shown in the link.
https://www.weekendnotes.com/the-bicentennial-bikeway/
Who will enforce the rules?
This is an interesting discussion because it’s about more than physical factors like speed and size. It’s about urban space and the character that we want those spaces to have. So, for instance, I believe that sidewalks are for walking, standing, sitting, and staying activities. Some people on sidewalks are focused on moving through, and other people are staying, talking, buying, watching, and so on. The factor that ties all those activities together is human scale and human speed. In regard to wheelchairs, bikes, scooters, etc., on busy urban sidewalks, I feel strongly that all should be limited to walking speed of about 4 mph or 6 kmh. Vehicles and runners traveling at 7-10 kmh should not be using busy urban sidewalks, period.
Similar to Laurence, I believe the public right of way should be segregated to the kinetic energy each use typically produces. The formula is 1/2*m*v^2 with m being mass and v being velocity. Thus if you may have a sidewalk, “bike lane” and motor vehicles you determine a range of kinetic energy to determine permissible uses. Width would be dictated more in terms of usage at any particular point. However, lane width does change the typical velocity of motor vehicles so you would want to factor that in.
It seems strange that safety isn’t one of your bullet points with regard to why we divide transit types – cyclists are at high risk from heavy, high speed automobiles, that’s why we want to build barriers to physically stop cars from killing cyclists. I’m deeply concerned with any conclusions you draw, without that concern at the outset.
Amie, I couldn’t agree more. Actually in the Netherlands this discussion has been going on for a while already, them being at the forefront of cycling and related non-motorized (or lightweight electrified) modes. The ANWB (motorists federation, actually more mobility federation including cyclists) has elaborated a nice vision on this, and it includes safety concerns by default.
They classify vehicle classes on speed and weight (not width), because in collisions, it is the kinetic energy that matters, and that goes mass*speed^2. The idea being that in collisions their needs to be some symmetry to avoid one of both absorbing all the energy (read: severe consequences).
From that point of view, mixing transit and high-speed bikes (whether race or electric) is unacceptable. Actually, ANWB recommends designs aimed at one class, which can only be mixed with one class lighter or heavier (in which case the heavier class is strictly constrained, e.g. in speed or in permission to overtake). Example: a street may be designed for light motorized vehicles (cargo-bikes, golf-cart-like vehicles) intended for speeds around 35km/h and weight ~150kg (incl driver). This can naturally be mixed with regular cyclists and cars (with strict speed limit of 30 and no overtaking, but NOT with pedestrians who should have a sidewalk here, and NEITHER with light trucks (let alone heavy ones). One could allow the latter class under even stricter conditions like delivery time windows and/or obligation of collision avoidance equipment.
In my view, this concept generalizes the bike lanes in a smart and future-proof way. It is a pity though that ANWB has only published Dutch reports on this, aimed for their member and local policy makers. I think the world could learn a lot from this!!
More info including downloadable reports (although in Dutch, main concepts are easily grasped because they are in pictures and schemes and similarity with English): https://www.anwb.nl/belangenbehartiging/verkeer/verkeer-in-de-stad
Great thinking on these points. BTW, I thought of going to Human Transit after reading the latest developments for an over-$2,000,000,000 light rail line in Brooklyn and Queens which would probably work as good or better with buses or e-buses; lo and behold, Jarrett has a link to just using paint on the lanes (as in SF).
Regarding reference to Chris’s Dutch ANWB report, it is available in English right on the page Chris has hot-linked. Scroll down a bit.
It is brilliant thinking. I just spent some time in Holland, and experienced built examples of the methods discussed. They work, often on an instinctual, psychological level (“I belong/don’t belong here;” “I shouldn’t go too fast here;” “I should walk my bike here.”). You sometimes don’t even need official signage to grasp how you should behave in a given environment.
Generally in (properly designed) Dutch streets the presence and type of required cycle paths depends on the speed and volume of motor traffic (national CROW guidelines fit closely to what the ANWB writes here). The motor traffic ofcourse brings the main danger through kinetic energy.
Cars are generally not mixed with bicycles above 30kmh zones with limited traffic intensity. If you go up to 50kmh or busier roads then there is generally a fully segregated cycle path. Red pavement and wide enough for overtaking and cycling at least two abreast in both directions.
Through my Dutch eyes it seems like a rather alien idea to ever mix cyclists with cars other than in low speed, low intensity situations. I once cycled in the US and found it rather scary tbh..
I believe the overall design philosophy is called ‘sustainable safety’ by the way:
http://www.aviewfromthecyclepath.com/search/label/sustainable%20safety
This concept actually already exists in California and Florida.
Example California:
https://goo.gl/maps/1PF2JrV5RU22
Example Florida:
https://goo.gl/maps/xfRpUThvNX32
NEV lanes, aka, golf kart lanes! No one has political power like wealthy retired white people, and so both states quickly amended their vehicle code to allow for golf cart facilities.
These lanes and paths are also open to other low speed vehicles like bicycles (but not scooters in Florida).
And Annie is absolutely correct.
We dont have separate lanes because of speed or space, we have them for safety. Odd omission on your part.
I would design for separation on a case by case basis, based on the principle of who needs to get through reliably. In my mind, this would usually put transit on top of the priority hierarchy for several reasons. So you design for that condition, like the examples connecting the ends of cul-de-sacs in Jarerett’s book. Sometimes you only connect to give the mode a special and speed advantageous connection that makes moving all the modes better. You can broaden this principle to design of lane allocations – observe humbly what is frustrating people and then design to harmonize with the least effort needed.
Connecting the ends of cul-de-sacs for some modes instead of others is one of the fundamental aspects of Fused Grids. I like your suggestion because I think Fused Grids have the potential to greatly improve our transportation networks with minimal cost.
I while ago I did an interview with Dick van Veen from Dutch-Canadian consulting firm Mobycon about this exact same issue: http://www.everybodyhatestraffic.com/blog-entries/2017/12/4/mode-oriented-street-design
Traffic classification also written about here by Mark Wagenbuur: https://bicycledutch.wordpress.com/2016/01/26/crowded-cycleways-lead-to-new-urban-design-approach/
Great article Jarrett! Need to explore theories of how to classify traffic in general (i.e. by size, mass, width) rather than just modes because new modes are constantly being invented (hoverboards, electric scooters), and it is not always clear where they belong in existing infrastructure. Even more complicated as you mentioned Jarrett is that the same mode, cycling for example, can have significant differences in speed.
An 8 year old learning to ride a bike? My guess is that anyone who hasn’t learned to ride a bike by 8 lives in a family that isn’t likely to teach them at that age.
I think width is mostly misleading. The division is based on the threat a vehicle poses, which should be a factor of speed and mass. That’s why a motorbike is an inappropriate fit for the mid-speed lane, regardless of how fast it’s going. Width matters only to the extent that lane width needs to be wide enough to accommodate passing between the vehicles that find themselves there.
Interesting way of looking at things, overall, but I have some sticking points:
1. I agree with others here that safety (primarily determined by motor vehicle speed) is the most important reason to separate bicyclists from motor vehicle traffic. Not inconvenience to faster vehicles. Width required to operate is minimally important in this regard.
2. The need for separation between bicyclists and motor vehicles also has a lot to do with psychology (e.g., experience, cognitive development, situational awareness, etc. which can be shorthanded as “confidence”). Yes, some people are fully comfortable mixing with faster traffic, but most aren’t. Typically, there’s a correlation between confidence and speed in bicyclists, but not always. With e-bikes it is possible for very inexperienced bicyclists to ride at 30kph+.
3. The mid-width category has twice the speed range as the other two. What you’ve essentially done is taken everything that isn’t a car or a pedestrian and thrown it in one “mid-width” space. And these things (bikes, e-scooters, skateboard, etc.) have very different operational characteristics. Speed is very dynamic with traditional bicycles. Someone might ride 20kph on flat ground, but only 10kph uphill while hitting 30kph downhill. But an e-scooter or e-bike can be much more consistent in its speed (which is actually more of a negative than a positive). A bike can maintain speed over rough ground (larger wheels), but a skateboard/scooter will have to slow down. And so forth. These modes can all co-exist in the same space, but only if it is wide enough for the volume. A 5 foot wide space on a busy urban street is often not wide enough. A 10 to 12 foot path is also not wide enough. So if we’re going to tell e-scooters to operate in the “bike lane” or shared use path (which seems to be the emerging practice) then we will have to increase bike lane and path widths fairly substantially.
Well, thinking about traffic like this really complicates things.. But the main point for me is: why do we drive?? I mean, you can still get all the benefit of a personal car for the size of a scooter/motorcycle. If freight, use a truck.. (or a delivery van) if passenger travel by the half dozen, well cant everyone in the family have a bike? Or some mobility devices that suit their needs? It feels to me the only reason we make personal cars so huge is because they are descendants of the horse-drawn wagon. Streetcars from the turn of the century were smaller than big trucks and buses we have today, I guess because of advances in technology. But, Couldn’t trucks and buses do with sharing low mixed traffic speeds in some areas (especially for trucks) and dedicated lanes (for buses)? This brings me to another point.. the whole “to your door” thing is likely super inefficient for freight as well as passenger traffic.. couldn’t “to your street” suffice, where you walk a couple minutes and pick it up (at least for anything package sized or smaller)? Seems mundane but scaled up I assume this would save a lot of resources and headache.
Also, central to all this would be to re-educate drivers and basically everyone on how they need to get used to sharing space.. and that car lanes are not actually car lanes, and on and on
Since you are just brainstorming here, I’ll suggest that the only reason we need to separate the mid-width type modes from the wide modes is that we allow the wide modes to go too fast. If every vehicle where limited to 20 mph maximum, and 15 mph in some situations, a lot of the need for separation would go away. I see no reason in dense urban areas why anyone needs to travel more than 20 mph. Even a bus. If faster speeds are needed, rail is the alternative.
I share the same perspective. If I were to make it an algorithm, I would tie the speed limit on the street to the lots around it.
If lots are 2 acres, speeds are 40 mph.
If lots are smaller than 0.25 acres, speed limits should be 15 mph.
The world gets relatively smaller as cities get denser, no need to travel as fast.
“At lower speeds you can mix them more.”
Lower the speeds. People own automobiles, they do not own the road – it is a public commons. They have a right to travel, they do not have a right to travel at X mph/kph.
Well, I don’t know in your country, but in France, you’d get hanged for daring saying that. And not by the authorities.
The Fused Grid solves the “angry hordes of drivers” problem. Essentially, it allows for multiple grids superimposed upon one another. There’s no need to make EVERY speed slower, arterial roads can stay fast, but locals and collectors should be slowed.
As an advocate of transit, cycling and walking, I might suggest that “narrow” for the last column might be the wrong word to look at the possibilities of walking, though it does depend on context. All too many footpaths (especially in inner cities) are insufficient for the task of transporting the many people who choose or need to walk.
Agreed. A sidewalk featuring the bare minimum width of one person walking is woefully insufficient – especially if there’s no buffer space to separate it from other modes.
There are parts if New York where the sidewalk needs to be wider than the street to provide adequate capacity for people walking. When the sidewalk is to narrow, you have ridiculous situations where the street is encouraging you to crawl down the car lanes at 3 mph in an Uber because it’s still faster than 1 mph in a pedestrian traffic jam.
I agree with a few other commenters that kinetic energy should be half the basis of lane allocation (the other half being based on what function the road fulfills in the overall transport network).
It elegantly resolves three interrelated issues:
1. Who needs a separate lane?
2. At what speeds should various “vehicle” types be allowed to interact within a lane?
3. What level of separation between adjacent lanes is required?
For example, analysis of a particular road indicates that it is a residential side street that is important for recreation of residents, pedestrian and bicycle traffic and low speed vehicles accessing driveways. Based on this functional analysis, it is determined that walking/ recreational uses should be provided for separately from other uses.
Then, acceptable kinetic energy ranges for these two uses can be defined based on what is acceptable for the most vulnerable user in each user class.
With this is mind, we can mathematically define what speed various vehicles must be limited to in order to fit both ranges. Perhaps cars at 2km/h in the pedestrian zone and 25km/h in the other zone. Perhaps bicycles at 8km/h in the pedestrian zone and unlimited in speed in the other zone.
Having done that, we can decide which zone each user belongs in. So we decide that cars at 2km/h are impractical, so cars are limited to the other zone only. Runners and cyclists might be permitted in both zones (with some restrictions) etc.
Finally, having done all that, separation can beer addressed based on how often people will transition between zones and how damaging a runaway vehicle in one zone would be to an adjacent zone.
Perhaps you need to iterate a few times to refine the allocation, but that seems to be the bones of it.
Should a new vehicle type be invented, you simply calculate the speed limits required to fit the kinetic energy ranges of the existing zones, then decide where it belongs and under what restrictions.
If a new vehicle type becomes pervasive (like cars are), you might need to revisit the functional analysis, but generally, things should just slot right in.
This is a major problem with the Atlanta Beltline. You just have one not-so-wide path — to save room for the transit that may never be built — that is shared between warrior cyclists, casual cyclists, strollers, scooters, and pedestrians. Because of this, it’s not really pleasant for the casual users and not really efficient for those attempting to use the path for active transport.
You could seperate on the basis of focus.
Bicyclists and motorists usually are focussed on their driving and want to get to their destination efficiently. Pedestrians also want to stop, talk, relax and they need space to turn, to swing their bags, to walk next to each other. They are not, and should not have to, be focussed on efficient traffic flow.
“… motorists usually are focussed on their driving and want to get to their destination efficiently. ”
Your lips to god’s ears, brother
Singapore is the only place I know with a formalised and enforced system already in place
https://www.lta.gov.sg/content/ltaweb/en/walk-cycle-ride/rules-and-code-of-conduct.html
The upshot is:
– Normal bikes can travel where they want
– Electric bikes should travel on the street rather than footpaths, but can travel on paths with no street.
– Scooters and PMA’s should be on footpaths rather than roads
They also have fully segregated cycle lanes which add to this mix.
The distinction between a normal bike an an e-bike can be blurred. The power output of an e-bike varies tremendously depending on the model and setting. Sometimes, when traveling on a sidewalk, I’ll turn my motor off completely, so it is 100% functionally equivalent to normal bike. Technically, just having the motor there makes the bike an e-bike under the law, which restricts where it can go – even if the motor is turned off, or inoperable due to a dead battery, or some other electrical malfunction. This seems broken.
Similarly, many people get around in motorized wheelchairs. They have a motor, but they are functionally a pedestrian. In theory, one could imagine a wheelchair being equipped with a more powerful motor, allowing them to be ridden in bike lanes at bike speed. If such devices were banned from sidewalks, it would completely defeat the purpose of providing mobility for a disabled person who is unable to walk. If the law allows it, a motor to allow wheelchair-bound users to accelerate themselves to bicycle speed in a bike lane could provide a huge mobility improvement, while also sparing ordinary transit users the grief of having their bus get held up by wheelchair users only traveling a few blocks.
Ultimately, blanket restrictions “if it has a motor, it cannot be here” should be replaced by common sense and a clear understanding of how fast you can go in various places and who has the right-of-way. In the case of a sidewalk, the pedestrian has the right of way, and wheeled vehicles traveling at pedestrian speeds should be allowed in general, so long as they go slow and are physically small enough to fit and not get in the way (a definition which would exclude cars).
There is one area, however, where I think there should be an absolute line in the sand – even if e-bikes are allowed on sidewalks, anything gas-powered (including motorcycles) should not be allowed anywhere where cars are not allowed. The reason for the distinction is the desire to contain the noise and pollution.
In DC, we have to get the design right. A few bike lanes are protected and between parking and the sidewalk. These perform the function of a bike lane. Others are unprotected and located between parking and car traffic. These are “just a bike lane,” serving as extra parking, drop off points and any other use drivers claim for them. Because in the US, at least, cars always take precedence and drivers think nothing of taking over any available space. Sometimes the design even invites them to do since most traffic engineers don’t ride bikes frequently.
It would be useful to reflect on how many top-tier cycling cities — Amsterdam, Copenhagen, Stockholm — have wider sidewalks with the bike lane as a portion of the elevated sidewalk. This means it is impossible for drivers to enter the bike lane and lends permanence.
This is admittedly somewhat American-centric, but for a more modality neutral name for ‘bike lane’ I rather like the term “Green Lane” as a generic term. It lines up with NACTO and FHWA guidelines for the color to use for bike lanes, but the lack of ‘bike’ in the term can be implicitly more welcoming to skateboards, scooters, &c. It also piggybacks a bit on environmentalism, which mostly applies to those modes of transport, relatively speaking.
The only real downside is that it would seem to suggest that it doesn’t count/exist if the municipality doesn’t want to spend the money on paint, or that anything without literal green coloring on it is fair game for cars.
It would be nice to have a broader term for these lanes that emphasizes their value relative to cars, rather than something that sounds technical. For example a “safe lane” or “clean lane.”
Agreed! ‘Green Lane’ and ‘Clean Lane’ work well, ‘Safe Lane’ doesn’t sound as good (I don’t know why).
I would add safety to the list of reasons we separate traffic. Even if I could bike at comparable speed to a truck (and sometimes in heavy traffic maybe I could) I would feel a lot safer if I didn’t have to do it in the same lane as them. And separate bike lanes can reduce other risks such as getting hit by opening car doors.
I like green lane. Works both as the color as as “clean” since there are no pollutants being emitted by users of that lane.
Green lane would suggest to me that I can drive there in my electric car…. not really what we want me thinks….
The one thing I hate about this and immediately thought of when I saw Sarah’s twitter post, is putting pedestrians and low speed with “narrow” width, because it will be interpreted to only need narrow width in design and space allocation.
One of the most damaging design guidelines in NSW has been the 1m minimum footpath width. Narrow footpaths are not attractive to use, and contribute to putting people in cars. 1m is so narrow, that my wife and I struggled to walk side by side with our newborn in our pram. 1m is so narrow, that two bike handlebars would touch unless each bike is at the edge of the path. Wide footpaths on the other hand are wonderful and induce demand.
If anything, speed and width should be inverted, to control the speed. We know that drivers speed when they drive in extra wide lanes, and they slow down when driving in narrow lanes.
Width should relate to capacity of the mode. Pedestrian and other slow modes have the highest capacity of throughput, and should be afforded wide space, not narrow space. It is when that happens, that we get truly great spaces, efficient mode choice, and a better society.
Well the narrow one, is called a sidewalk.
a key need for transit is to reach the curb; intending riders must board and alight. that leads to friction between cyclists and transit.
Really interesting discussion point thank you.
I’d like to suggest light lanes for cycles, scooters and the like, and heavy lanes for cars, trucks and the like.
Width of lane will need to be based on demand and localised priorities. Risk arising from wide, mid-width and narrow naming is that it is used to thoughtlessly default to giving over the lion’s share of street width to traditional traffic lanes, which isn’t always the optimum mix and would be a brake on innovation. In areas of heavy pedestrian flow and low vehicular throughput, the ‘wide lane’ should be the sidewalk, for instance.
Potential speed is not a useful definer I would suggest, when in plenty of cities cycles and scooters can achieve greater speeds than congested motor vehicle traffic.
Light lanes and heavy lanes maintain a reasonably intuitive association with the modes that use them, but carry fewer expectations about what traffic should use them (who knows what will be invented next…), how they should be designed and where they should be placed. This leaves these questions open and up for debate upon implementation of each street improvement scheme, giving innovation a chance and designing streets most suitable to their specific circumstances.
I’m certain that this debate is only just beginning.
The Fused Grid takes a slightly different approach to integrate many different scales of transportation. It is speed based, but instead of rethinking “lanes” it re-thinks our road hierarchy as follows:
Lanes and Local roads become Shared Streets with high levels of Permeability and Connectivity
Collectors favor cyclists by putting the multi-use lanes in the center of the road with automobile lanes on the edges.
Arterials and Freeways remain much the same as they are today.
https://medium.com/@jvannpashak/a-transportation-revolution-wont-occur-overnight-but-it-could-still-happen-faster-and-cheaper-7e6952ab1f80
The purpose of a riad space is to move people and freight. Should people density in the transit mode be a factor? A priority? That would mean a bus with a full load has more priority than say a car with the typical one person during rush hour. Therefore more space is allocated to the bus. Similarly cycles which have a relativly high people density are given more space than sungle occupant cars.
I guess this is how transit lanes work. Buses and cars with multiple occupants and bicycles. But now we have massive energy differences and vulnerable people mixing with hard cars and buses.
Hmmm