The endless debate about how fully automated cars would change our cities often starts with the assumption that we will have fully automated cars soon. We imagine that we’ll all be riding around in totally automated taxis, whose lack of a driver will make them cheap.
This is the essence of the “driverless cars will replace transit” fantasy. I’ve argued many times that this idea is geometrically incoherent in dense cities, because regardless of automation there isn’t enough room to move people from big transit vehicles into small ones.
But it’s also important to ask: How soon is this truly driverless vehicle really coming?
Levels of Automation
Here is the standard 1-5 scale, by SAE International, that everybody uses to talk about this. Level 1 technology is available now, but the kind of automation that totally eliminates a driver, thus transforming the economics of all hired transportation, comes only at Level 5.
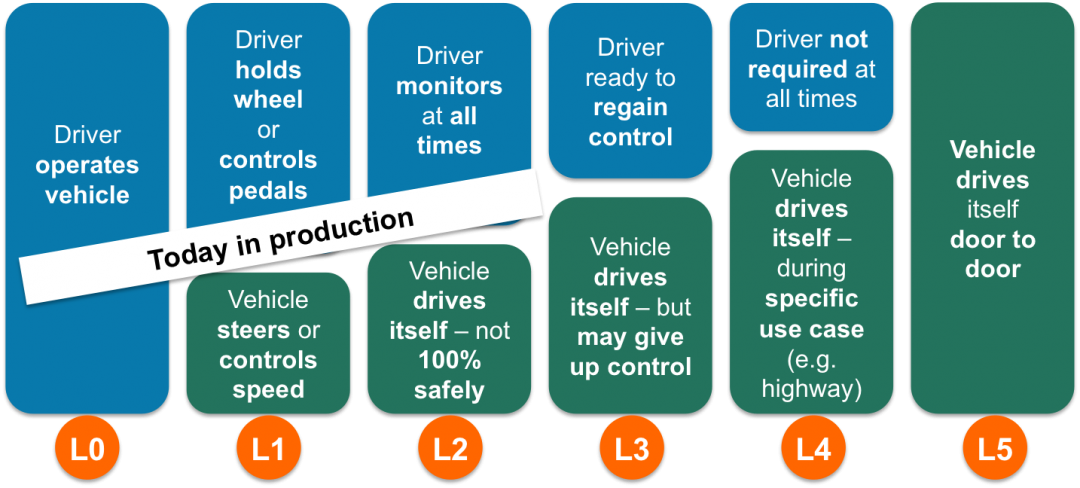
Six levels of automation. Videantis. http://www.videantis.com/what-are-all-these-automotive-cameras-doing.html
Most experts seem to agree we will soon have Level 2, enhanced driver-assistance that shifts the driver to more of a monitoring role, but that the journey to Level 5, actually eliminating the driver, is a long one that has only begun.
Steven E Shladover, from the PATH program at UC Berkeley, has been thinking about vehicle technology for decades. In his excellent (and tragically paywalled) piece for Scientific American this June, he noted some of the reasons why full automation is so hard, and requires solving problems that are not just technological.
A fully automated vehicle needs to be able to do the right thing any situation, and handle its own equipment failures. In big airplanes, this is achieved only through multiple redundant systems that make the product massively expensive. Nobody knows how to scale an airliner’s level of redundancy to an affordable mass-market vehicle.
Crossing the Ravine of Distraction at Level 3
The biggest barrier to full Level 5 automation may also be a reason to leap to it prematurely. It’s human reaction time at the intermediate levels of automation. Shladover:
The prospects for level three automation are clouded, too, because of the very real problem of recapturing the attention, in an emergency, of a driver who has zoned out while watching the scenery go by or, worse, who has fallen asleep. I have heard representatives from some automakers say that this is such a hard problem that they simply will not attempt level three. Outside of traffic jam assistants that take over in stop and go traffic, where speeds are so low that a worst case collision would be a fender bender, it is conceivable that level three automation will never happen. [Emphasis added.]
Anyone examining their own experience will see that this is a big problem, and that it’s not a technological problem.
To make this more vivid, let’s stop and think what the opposite of automation is. It’s an old mid-century car, maybe my parents’ 1962 International Scout, a tough precursor to today’s SUVs. The primitive suspension pounded your body with the textures of the road. Your hand on the stick-shift felt the movement of the gears. When something shoved back against your attempt to turn, the steering wheel sent the shove right up your arms. To stop fast, you had to pound the brakes with your weight. Nothing pretended to protect you from the weather. With all this vivid input flowing into you, demanding constant decisions, you would never fall asleep at the wheel, or be tempted to look at the newspaper on your seat. Driving was hard, but often ecstatic. When power steering and automatic transmissions came along, my elders agreed that by reducing the level of effort and stimulation, these inventions made driving harder to focus on.
The journey from here to Level 3 looks just like the journey from the Scout to here. It’s the same straight-line path from vividness toward tedium, from control to passivity. It ends at a faintly ridiculous extreme: you sit there, unstimulated and with nothing to do, but you must still pay attention. We could reach a point where the only safe “drivers” are people with years of meditation training, since nothing else prepares you for that situation. And all that training would be expensive, pushing drivers’ wages up!
At Level 3, Forward or Back?
If the Level 3 problem is as hard as it looks, how will we respond? Tech-optimists will see this as a reason to rush even faster to Level 5, maybe prematurely. But many people who get a taste of Level 3 will be keen to stop at Level 2, where they still feel like they’re in control. Level 3 accidents, caused by human inattention but easily blamed on the technology, would inflame both sides in this debate.
At that point, will the reason to go forward be safety? We don’t know, because we don’t know what the impact of Level 2 will be on fatality rates. Maybe they will have improved so drastically that Level 5 doesn’t offer that much more, or at least not enough more to make the public ready to accept the loss of control at that level.
So the other issue will be the liberation of labor, especially professional drivers. All the dreams of driverless taxis, for example, require getting all the way to Level 5. Maybe it will happen, starting with fleets, but the question of whether you can jump over the ravine of distraction at Level 3, and land all the way at Level 5, is an open one.
Are we sure driverless vehicles will be cheap and abundant soon? I have no idea, and nobody else does either, but the path does not look easy.
Automated Transit Is Easier!
So what does this all mean for transit? You read it here first: Full automation of transit is much easier than automation of cars. (If it’s impossible, that’s only because driverless cars turn out to be impossible.) Shladover:
And yet we will see highly automated cars [vehicles?] soon, probably within the coming decade. Nearly every big automaker and many information technology companies are devoting serious resources to level four automation: fully automated driving, restricted to specific environments, that does not rely on a fallible human for backup. When you limit the situations in which automated vehicle systems must operate, you greatly increase their feasibility. [Emphasis added.]
High-ridership fixed route transit vehicles are perfect examples of this possibility. They run on pre-set paths in a narrow range of situations. In fact, the busier they are, the more money we should spend to make these situations narrower: exclusive lanes, automated stopping and fare collection, weather protection technologies, and potentially limits on lateral motion, up to and including rail. Unlike vehicles that could go anywhere, automated transit vehicles don’t need a map of absolutely everywhere. All of these things make transit automation easier. In effect, transit is a case where you can get full automation with Level 4 technology.
I am not making light of the considerable challenge of managing the impact of the transformation of the workforce wrought by automation. I am very concerned about those impacts. But the effect of automation on work is an issue in many fields, and when it becomes critical we will find a collective solution. Smart people are thinking about it.
Takeaways:
- Full automation of any kind, going anywhere, the goal that replaces most human labor, is quite a ways off and requires overcoming several obstacles that nobody has cracked yet. It may not be possible.
- Driving a partially automated vehicle may be harder than driving a vehicle today, because the distraction problem gets worse. This may increase the skill level of the labor required, and thus the labor cost.
- But the distraction problem with partial automation may also cause a premature rush to full automation, plus a strong movement to stop at Level 2.
- Technologically and spatially, high-ridership fixed-route transit is much more easily automated than any other vehicle under discussion today, because it operates in such limited situations. Fully automated rail transit, in regular service, is over 30 years old. Driverless buses are under development and present especially promising options especially in fixed rights of way.
- If driverless transit were ever achieved, the explosive growth in transit abundance would be extraordinary, because labor cost is the main limiting factor today. This vast increase transit would mean cities could grow denser with less traffic, putting more opportunities within a shorter travel time for everyone.
- But again, full automation may not be possible. We don’t know.
I am not sure what we will do about this, apart from telling the “we-should-neglect-transit-because-driverless-cars” people to take a cold shower. But that’s the terrain ahead, and to me, it looks like transit has a very promising future.
FWIW Jarrett, you’ll get no argument here with almost everything you say; there’s just disagreement on likely outcomes.
Yes, automation of transit vehicles running up and down set routes is easier than programming vehicles to be able to go anywhere in a large geographic area. However, programming small AVs to have utility in a relatively small area – say San Francisco, DC, or Manhattan – isn’t that much harder technologically; it’s mostly just additional grunt work. It will take time, but would it take so much time that autonomous transit networks could be designed, developed, and functioning long enough before robotaxis that they could bring about a permanent rider base impervious to competition from on-call AVs?
Google apparently feels that their AVs are now a little bit safer than a typical newly licensed driver. It just shouldn’t take forever to get them to the point where they are better than the average driver. They could then start saving lives, even if not perfect. Ford announced in August that it plans to mass produce autonomous cars solely as shared AVs for fleet operations by 2021. GM, with its investment in Lyft and purchase of Cruise Automation is on the same tract. Uber has its own thing going in Pittsburgh in cooperation with Geely Volvo. How many North American transit agencies or bus manufacturers have committed to having autonomous buses providing transit service within the next five years?
Until very recently, I was acutely concerned that our local transit agency was in real danger of going belly up from lack of preparation for competition from on-call AVs. That agency still seems headed towards the precipice, but it might not be a disaster. Potential SAV providers and vehicle suppliers are doing more and more of the right things. In cooperation with transit agencies, Uber is beginning to provide subsidized service where it would be unacceptably costly for regular buses, and is learning ways to enable folks who don’t have cell phones and credit cards to use their services. Google is launching a carpool connecting service through its Waze operation, apparently limiting reimbursement to drivers to the 54 cents the IRS says it takes to operate a car. Ford is buying the Bay Area shuttle bus service Chariot.
That combination of enabling service to the poor, pooling rides, and planning to operate buses has the potential of accomplishing much of what we all want, but without the ever increasing tax requirements of transit-as-we-know-it. In terms of geography, there is the real possibility of reclaiming space currently occupied by a lot of empty seats parked on freeways during the peak commute.
“I am not sure what we will do about this, apart from telling the “we-should-neglect-transit-because-driverless-cars” people to take a cold shower.”
Yes, but people like Randal O’Toole won’t get the hint and still persist in his ongoing transit bashing. If he did get the hint, his arrangement with the CATO Institute might be in jeopardy.
NOTE; After the two comments above the post was substantially revised, mostly to expand and clarify the “ravine of distraction” problem that seems critical, to me, in conceiving a real path to automation.
I think there is a fundamental mis-understanding of what the technical problems limiting autonomous vehicles where, and why we are going to (largely) skip from L2 directly to L5.
Computers are already better than humans in many ways:
– they respond faster to unexpected events
– they can simultaneously track more objects
– they never get tired and are never distracted
– they know exactly where they are in the world at all times to within ~40 cm
– they “remember” a global accurate to ~10 cm, updated sub-hourly
The technical obstacles where that up until recently computers weren’t very good at understand the world around them – they couldn’t “see” things in the way we can. That has all changed with a breakthrough technology – deep-neural networks. Computers can now combine multiple (dozens) of sensors, from radar to cameras to lasers, and generate a very accurate projection of what is around them. This accuracy is improving exponentially because the “training set” of data is now increasing exponentially – collected from actual autonomous vehicles driving. Autonomous vehicles can now see much better than people – in 360 degrees, in the dark, in glaring light, through fog.
Full automation has already been demonstrated by Tesla and there are *no* significant technical barriers to putting it into production. Today only luxury cars like Tesla’s can afford the array of sensors needed. The cost of the sensors is now rapidly decreasing because of economies of scale and will make autonomous vehicles affordable for the masses within 3 – 5 years.
Don’t under-estimate how fast adoption will happen. People don’t enjoy driving. And the future is still bright for transit. Car ownership no longer means freedom, it means being locked into payments and maintenance.
Well put – and consistent with what we see being done by Tesla, Google, and auto manufacturers; they are generally aiming straight for L5 automation, with few efforts to bring a L3 product to market.
As for the effect on transit, I think that Jarrett takes far too much comfort in his geometry argument…and ignores a lot of the politics involved. If you have widespread adoption of L5 products with car-sharing (Uber and Lyft), then you lose the economics that are underpinning for coverage routes. If L5 is adopted for transit, you lose the public employees that provided non-trivial political support for transit. And L5 car-sharing *with public subsidies for low-income riders* opens up all the areas *outside* of transit to folks who are currently “capitve” transit riders.
So….if fixed-route transit is cut back to *just* the high-volume routes, can it survive? Certainly in a handful of metros (NYC, Boston, DC, etc.)….but outside of those few, can transit work any more if it is pruned back to those levels?
Transit running every 10 minutes or so is much preferable to a car-share that even in high demand areas requires time to schedule the trip, then waiting for it, etc. People hate waiting.
It also should be noted that what works in the urban layouts of Houston, Phoenix, or Oklahoma City will not work in less auto-centric, Old World-style areas like Florence, Amsterdam, Havana, or Kyoto. Most American metropolitan areas were laid out with wide arterial streets, but the same can’t be said of cities in most countries.
Henry, is that correct? I’ve hailed Uber in several east coast cities – New York, Boston, Miami, DC, Charleston, and Atlanta – and I’ve never had to wait more than four or five minutes for a pick-up.
But I agree that you’re far more likely to see autonomous cars encroach on transit in auto-centric New World cities before you see any real changes in Old World cities. There’s likely too much path dependence in their urban form for them to adapt to current transportation technology.
In my experience, while regular Uber and Lyft are fine, UberPool or Lyft Line generally have longer waiting times to the point where even 15 minute transit would be so much better.
The wait for Uber is not that long, and with roving autonomous taxis it will be even less of a wait. Besides, when it costs you less than other options, people won’t mind to wait the 2 or 3 minutes. In dense cities the wait will be so small it will almost be irrelevant.
>> Today only luxury cars like Tesla’s can afford the array of sensors needed. The cost of the sensors is now rapidly decreasing because of economies of scale and will make autonomous vehicles affordable for the masses within 3 – 5 years.
Right, but what if installing and maintaining the sensors is still not that cheap in five years? If the software and data is ready, but everything else is expensive, then it seems like this will be very popular with fleet based industries, and not that popular for the average driver. A trucking company, transit agency or cab company would easily pay an extra 10 grand for an automated vehicle. But your average consumer would not.
It is very hard to predict how quickly things will change.
Fraser, this has little to do with technological readiness. It’s about human reactions, the culture around driving, and the universal fact, well known to technological historians, that at this stage in the development of any product, all kinds of problems and nasty consequences have not yet been foreseen. (To the extent that they are foreseen, the boosters will spend a lot of money trying to change the subject.) Hacking and cybercrime — an existential threat to automation of everything — is an issue. The trolley problem is an issue. How humans react to driverless vehicles in the urban environment is an issue. Induced demand is a huge and possibly disastrous side effect for big cities.
This article completely misses the point that an autonomous vehicle is a mission/safety critical Internet of Things (IoT) and that, as of today, there is no sign that any company can build such a MC IoT – not Cisco, Microsoft, Google, General Motors.
You have to assume that autonomous vehicles will be subject to malicious attack, and not just the vehicles, the infrastructure (traffic lights etc.) that any transport system requires.
Eventually yes, but don’t hold your breath. See – http://wp.me/p7MvnT-E
Yes, hacking is another cause for concern. If I listed them all I’d be tl;dr.
People getting in a driverless vehicle is an assumption that is overlooked. I will NEVER participate in driverless transportstion & millions feel the same way.
Wait. Does that include elevators?
Have you ever ridden the little people mover that takes you from terminal to terminal in airports like San Francisco, Detroit, Tampa, O’Hare, Atlanta, or SeaTac? Those are driverless vehicles. A few existing urban rail systems seem to have that same feature, like the Las Vegas Monorail and the Miami MetroMover, and Vancouver SkyTrain. This sort of thing seems much more palatable than a driverless vehicle on rubber tires on the open asphalt.
Ever since I started writing about this, I’ve noticed that responses from the techno-optimists don’t even respond to my argument. There’s no attempt to focus in and explain exactly what I’m getting wrong. I have heard all the marketing and all the optimistic spin, you don’t need to repeat it!
If you see a path across the Level 3 Ravine of Distraction, and a path to universal uptake despite all the people like Lance, just above, please explain it. If you have a compelling argument for why people who are in despair about their loss of control in daily life are going to let go of the steering wheel, lay it out. And while you’re at it, explain your solution to the moral issues around the trolley problem, in which corporations replace people in life-and-death decisions: https://www.linkedin.com/pulse/sorry-driverless-cars-arent-right-around-corner-john-battelle
Jarrett, here’s the response:
1) Ravine of Distraction – automakers will simply ignore it. There’s no reason that these vehicles have to go through each of these stages. Automakers will sell L2 vehicles, and sell L4 and L5 vehicles, and never really bother with L3.
2) Loss of control – people *constantly* engage in transportation where they don’t have control. Most notably *transit*, but any time you use a vehicle that someone else is operating. Whether it’s a bus, a subway, a taxi, an airplane….or even a private car that someone else is driving. People don’t feel compelled to always have direct control over their vehicles. Sure, some people will prefer not to buy or use automated cars – I remember folks that refused to get answering machines, and later those who refused to get cell phones. There’s no reason to expect that such folks will be a large enough segment of the population to matter much to market penetration.
3) Trolley problem – it doesn’t have a solution. That’s why it’s such a famous moral dilemma – it doesn’t have an solution even when a human being is making the choice. And that’s why it won’t matter in the adoption of autonomous vehicles.
1. The trolley problem is an interesting thought experiment (that writers like to focus on), but ultimately is a distraction for one simple reason: people plow into strangers *all the time* and AVs will do it less. Early test vehicles are already putting up impressive safety numbers and improving rapidly.
2. There are three companies testing AVs on the streets of San Francisco – no one bats an eye. The universal uptake will be within cities where cars drive slowly. The first ride will be a novelty. The second the new normal. That was my experience with Tesla’s auto-pilot at least.
3. Lance’s argument reminds me of all the folks mocking Uber – “I would never get into a stranger’s car!”. Today: $2B / month in rides.
4. I’ll leave despair about loss of control for Deepak Chopra. You’ll be hard pressed to find a driver in rush hour who thinks control of the steering wheel is decreasing their stress levels.
Right, but when a person plows into some strangers, there’s not a Billion-dollar company (google) to sue.
It’s a spectrum. People will choose where they want to participate in driverlessness and where driverlessness will be allowed. If we believe Fraser above we could have level 5 driverlessness on most interstate type roads now. But nobody is going to want full single-seat driverlessness from their bed to their desk or seat at the opera, see Lance.
Since, per Fraser, these vehicles always know where they are within 30cm they can know where they are allowed to permit the driver to switch from 2 to 5. On interstate fine go to 5. Pulled off at exit, back to you driver. That sucks for Uber but they can have a driver standing by at the exit. Downtowns may stay 5 free for a long time. Maybe until they replace stop lights with steel crossing gates.
Driverlessness will face increasing restrictions as they enter spaces shared by biological processes.
Oh, and as to the trolley problem. Well that is an economic problem. The more luxury the model the more people you will be allowed to kill by “accident.” Sort of like now.
Is it possible to skip to 4 without going through 3 — so that the car is either at 1 or just a standard usual normal everyday today car, but autonomous in the controlled place and only there — on the designated track or highway?
Say we’re talking about a bus — and say you have something like Ottawa’s bus routes, where for a lot of the time the bus is on a special road, with nothing bus buses, and then it passes through the middle of town where there are other vehicles, and acts normal, and then it’s back in bus-only land. The bus could be totally autonomous except in town, and a driver could either hop on for the town bits, or be there all the time but napping/reading out of town. if they just hopped on and off in town, and if the buses were coordinated such that this made sense, you could continue employing drivers, have driving in town, and massively increase transit without increasing human costs.
Thinking about cars, I think this would be incredibly popular with drivers — drive in the city, snooze/work on the highway. It would be as good as being on a train.
Living in eastern Canada where solar flares often disrupt systems am not confident that we can go to level 5 without this being addressed. I could talk about snow and the fact that we never had and will never have maps that are good especially outside cities.
But as often with technology I am more concerned about what those in charge want to do with it. And fundamentally what interest car manufacturers is trying to lock in all those who have decided to go car less.
It’s all about maintaining those monthly car payments. And that more than my concerns about how ready the tech is, leads me to believe that the fully autonomous car will hit a snag. It will also require significant expense from governments in maintaining roads to allow this tech to be rolled out.
With regards to transit it’s not the first time that I read here and elsewhere that salaries is the most expensive part of running transit.
A quick look at the way my local transit system reports its finances would tend to support that. Except on digging you see that the operating budget doesn’t include things like fuel and maintenance. It’s separate.
So no, in most cities the salaries of staff are not the most expensive part of running transit anymore. At least until we stop burning diesel.
But we will be told that by politicians to justify giving way to the “car-sharing” services and scrap transit.
To be clear I am not saying that’s what Jarrett is saying, simply that we are told that by the transit systems and it’s normal that we would defer to them. I have learn that with public finances you need to look deeper.
You keep referring to “dense cities,” but even in cities with high average density there is large variation in density between different parts of the city, and large variation in travel demand between different times of the day. Even if there is no spare road capacity in the densest parts of the city during peak travel times, there may be lots of spare capacity at other times and in other parts the city. Self-driving cars will be able to take advantage of this unused capacity.
There is also great potential for self-driving cars to increase road capacity. Even in places and at times where there is no spare road capacity today, self-driving vehicles may be able to create lots of additional capacity by using the existing road system (and parking space) more efficiently.
Here’s a study of transportation in Singapore by researchers at MIT and Stanford. Singapore is a dense city. Transit accounts for a large share of its transportation. But the study concludes that a relatively small fleet of shared self-driving cars could completely replace all current transportation by cars and transit combined, even at rush hour.
http://hdl.handle.net/1721.1/82904
The bottom line is that in a world of self-driving vehicles I think there will be few if any locations and times where “geometry” prevents self-driving vehicles from replacing public transit.
MaxO In many of the studies I’ve seen making your argument, it turns out that the surplus capacity is road space that has other better uses, like sidewalks, places for children to play, etc. Among the dystopian outcomes of a massive shift from large vehicles to smaller ones is the re-claiming of all those spaces for an ever-wider river of cars.
Then there’s the problem of “cleaning the fleet”…as a friend of mine put it in a thoughtful screed:
“The people with the autonomous taxis and buses are going to have to figure out very quickly how the decentralized, remotely managed vehicles can get cleaned before the next passenger arrives to find a wet brown substance in the seat… This sounds like a blue-sky idea, something that has not yet been service-tested. I predict very bad behavior by users who feel poorly served, or by homeless people or criminals who happen to see an open door.”
Excellent points.
The economics don’t work now, but because Uber and Lyft are not in the transportation business but in the monopoly and regulatory bypass business it works.
The drivers don’t realise that they don’t make any money after expense. Even if they don’t pay taxes. Removing the driver won’t change much.
Should public transit disappear we will be at the mercy of these companies. And prices will then go way up.
And we it will happen because in the U.K. When bus service was liberalised in many cities the private bus bandits would run a free service 5 min before or after the municipal service which was still collecting fares. Within the year most municipal systems closed and then the private systems raised fares to a much higher degree.
We better make sure that private self-driving service are either not allowed or strictly regulated. However in a world of CETA TTIP and TPP and TISA we might not be able to protect ourselves.
Perhaps – though there are some easy operational fixes to that type of problem for *cars*, particularly if you link usage of the cars to a smartphone. Have the car not open the doors unless the phone that made the hail is present; the car won’t move unless the phone is inside; tie the account to a credit card and have a camera in the car, so that passengers who damage/dirty the interior can be charged; and put a button in the app that allows a passenger that receives a car with a brown substance to notify the operator and request a new one.
It’s harder for buses. instead of a swarm of small vehicles (which allows you to pull one out for cleaning without disrupting service), a problem with a “wet brown substance” on the bus will have to linger for a while.
But on the bus, since it’s a shared environment with others around (including a driver), there’s much stronger social pressure *not* to relieve yourself on the seats. I’ve been riding buses in Raleigh for five years and have yet to encounter any such substances.
As you point out, there’s always a driver on the bus – like there’s always a driver in a taxi. I’ve ridden taxis for years in various cities, and have never encountered such substances either. The question is what happens when you eliminate the driver, from both bus and taxi. I personally can’t see that it would be much of a problem in *either* case. AV cars (and to a lesser extent buses) are far more likely to have problems with other types of uncleanliness – spilled food and drink, litter and rubbish, and the occasional nauseous passenger.
Yes, I agree, that will be a bigger problem. However, via use of electronic monitoring the user causing such damage should be charged and the car taken out of circulation for a quick clean up. Expect ‘cleaning stations’ and charging stations for autonomous cars where parking garages and gas stations exists today. Get charged up while getting cleaned up.
On the other hand, how many people see “brown spots” on high capacity automated transit today? It also seems a lot easier to monitor. Meanwhile, elevators at metro stations are routinely used as restrooms by the mentally ill and homeless.
“electronic monitoring”
So no more transit for anyone without a credit card? No cash payments?
Jarrett, long time no speak. Finally something we agree on! I just did a college paper on this. Nice article. By the by, I’m now thinking of working in NOLA, better chance of putting streetcars in dedicated lanes there, aside from the copious bus problems. Take care
Actually Jarrett, I have to tell you that I agree with you a little more on the mixed traffic rail. I think where I disagree with you now is what a streetcar is and what light rail is. I did you did something on that but let me explain my criteria for the difference is. I think the only difference is the size of the vehicles. A big streetcar should be a LRV and a smaller LRV is a streetcar where street planning does not apply. I know you disagree with me on this but just felt of putting my two cents in your mental farebox.
I still think Jarrett’s geometry argument is the most convincing case for why transit will remain and even expand in congested urban and even suburban areas. It seems that Jevons Paradox is always in force: as single-occupancy travel has become cheaper and easier over the centuries (first by foot, then by horse/carriage, then by bike, then by car/taxi, then perhaps by autonomous car), all we’ve done is induce more travel.
This is hardly “bad” – who wants to be stuck in the village they were born in for their whole life like most people were in the 18th century on the eve of the Industrial Revolution? – but I think it merely means we can’t yet argue that autonomous cars will overcome the timeless congestion-caused-by-induced-travel phenomenon, and that if congestion therefore remains in populated areas, so too will remain the pressure to get around it via fixed-route transit, on dedicated lanes, viaducts, and tunnels wherever possible.
All we’ve been doing in the great project called civilization is swapping out the mode of congestion – the old 1930s Garden City documentary “The City” showed sidewalks oppressively crammed with people, then with horses and carriages and bikes, then finally with cars. Ironically and against what we would ever have expected, the postwar trend towards dispersed settlements has only increased congestion exponentially – why do Atlanta and LA and Houston build 10-lane highways in a desperate effort to outrun congestion, only to find they have to widen them a couple years later?
Amazingly, dilution in living patterns induced by ever-cheaper/easier transportation has not led to congestion relief, but exacerbated it tremendously due to the ever-increasing need to travel for *more and more basic functions that previously required less or no travel.*
Why is there any reason to believe that autonomous cars will overcome this ancient dilemma? I can imagine a world where autonomous cars are eventually organized as efficient rideshares to minimize a lot of initial wasteful, capacity-gobbling deadheading and idle cruising, but I think when the initial wasteful excesses are wrung out, the resulting available capacity will be swallowed by increased travel induced by efficiency. Again, this is hardly “bad,” I think it merely means that we probably won’t escape congestion and therefore there will be perpetual pressure for space-efficient workarounds for congestion (transit).
Finally, while I can imagine eventual vehicular throughput gains on urban/suburban streets induced by cheap mass ridesharing (i.e. fewer single-occupancy vehicles, which will always be inherently space-inefficient regardless of who/what’s piloting them), I’m finding it hard to imagine increased throughput under the “faster and closer bumper-to-bumper travel” assumption. On most urban and suburban surface streets, bumper-to-bumper travel at low to moderate speeds is already the norm, so can we really push the cars closer together? If you’re already two feet behind the guy in front of you, can the autonomous vehicle get any closer? At such close distances, aren’t human reaction times irrelevant because physics are still in force: you’ll still need a minimum distance for a vehicle of a given weight to safely accelerate/decelerate/stop regardless of who/how it’s being piloted?
Moreover, low urban speeds are caused by the *basic structure of the urban fabric itself* – small blocks and frequent conflicts. Autonomous cars can overcome this if we enlarge blocks and limit conflicts (as we already do for limited-access highways) by introducing “smart intersections” and various other traffic control tactics that will attempt to allow strings of autonomous vehicles to speed unimpeded through urban and suburban blocks. But will it be a Pyrrhic victory like the first attempt was?
Here’s a good discussion of the potential for self-driving cars to reduce (or even eliminate) road congestion and increase road capacity: http://www.templetons.com/brad/robocars/congestion.html
I also think you’re misrepresenting Jevon’s Paradox. It doesn’t mean that if supply is increased, demand will always increase to consume all of that additional supply. If it did, all roads would always be at capacity. It just means that an increase in supply is likely to induce some increase in demand.
Max, I like the author’s thorough musings, but I think he still seems to be falling exactly into the trap I described: He described various *efficiencies* that will only increase capacity, thereby inducing more travel to fill the capacity.
I’m not arguing that induced travel will cause us to hit capacity *everywhere*, but in any economically dynamic region any transportation efficiencies always seem to be gradually eaten away by induced travel. Autonomous vehicles might not overwhelm Boise or Cleveland – unless they become economic dynamos (again) – but they could Houston or LA.
None of the efficiencies the author described are novel – in fact, we’ve been undertaking most of the improvements he cited for centuries already – lighter and smaller cars, better traffic control devices with optimized timing, better parking management, and so on – and we’ll continue to do so. But again, in regions with dynamic economies, these efficiencies will free up capacity that will be eaten up by induced travel.
It *would* be possible to overcome the historical noose of congestion if the spatial efficiencies autonomous cars introduced unfolded extremely rapidly – in less than a decade. That is, the road space they’d free up would increase so quickly that it’d take us years to dilute ourselves further enough to fill up that road space.
However, as I’m sure the author would concede, these tremendous spatial efficiences – the “1000%” increase in road capacity he pondered or even something more modest like 100% – wouldn’t occur overnight, but over a period of decades. It takes a considerable amount of time for enough of the improvements he described to happen at large enough scales for us to see the capacity increases. It takes time to replace traffic lights on a large enough scale to see large-scale improvements, for enough people to progressively purchase lighter and lighter autonomous cars, for new maintenance and operational practices (“convoys” etc.) to replicate themselves at scales large enough to reap the purported capacity increases.
That is, I think that because these improvements and their resulting capacity increases will occur *gradually,* precisely because they’ll occur gradually any modest, gradual, incremental increases in capacity will be eaten away in tandem by modest, gradual, incremental increases in induced travel. Isn’t this already the history of road transportation: from, say, 1880 to 1980 didn’t we increase roadway capacity by many thousands of percent through incremental roadway construction/enlargement and gradual improvement in vehicular and traffic management technologies? Yet in regions with dynamic economies, incremental induced travel kept pace with incremental increases in capacity. Had that increased capacity caused by efficiency flooded those regions in, say, 5 or 10 years, then maybe we would have thought we “out-teched” congestion. But it always catches up with us – at least in any area where even modestly large groups of people congregate!
Most roads already have lots of unused capacity most or all of the time. And transit has only a very small share of the urban travel market — less than 5% of commutes in the vast majority of metropolitan areas, and an even smaller fraction of urban travel in total. There would only need to be a small increase in road traffic to completely absorb all current transit users. Road capacity simply isn’t an obstacle to the complete replacement of transit by self-driving cars in most urban areas at most times.
And for the small fraction of roads and times where current road capacity does limit travel, there’s simply no basis for the assumption that demand will increase to consume all of the additional capacity created by self-driving cars. The most optimistic scenario for mass transit is that we might still need a few transit services on the busiest travel routes, at the busiest travel times, in the densest urban areas. Say, weekday morning rush-hour commutes into lower Manhattan. But other than those extreme cases, transit simply won’t be able to compete.
Again, the “most roads” argument is convincing if rural areas, smaller towns, exurbs, and economically-bypassed cities with overbuilt legacy arterials (Cleveland, Toledo, St. Louis, etc., and even in these metros there still are congested corridors) are included, and if you include roadways at late nights and early weekends when SOV and transit volumes alike are light. But in any given region with a strong economy, most primary roads are congested during daytime hours, and from idle chatting with traffic engineers, I was impressed to learn how much off-peak congestion has grown over the decades too (on both transit and in SOVs).
Again, due to the time it takes for new technologies to scale up, if autonomous cars only gradually, incrementally increase road capacity at the same time as they incrementally expand the “reach” of metropolitan areas, drawing further-flung areas into metropolitan economies, thereby incrementally inducing more dispersed travel patterns for needs that once required less or no travel, I think congestion will more or less keep pace with increasing capacity in most areas.
The history of every transport technology has reflected the pattern of the increasing “reach” (what we today call “sprawl”) of metropolitan areas, enabling travel for more and more things. So I’m skeptical that another iteration of transport technology could somehow break this timeless pattern. It may seem like we’ve mandated travel for so many things now that once required less or no travel that we can’t possibly induce any more, but who knows? Not so long ago you didn’t have to do much else than walk or bike for something as simple as going to school, and increased dilution enabled by new iterations of more “efficient” single-occupancy transportation could someday require us to travel extensively for some other yet unforeseen thing.
Additionally, a yet-unargued reason to continue investing in bus lanes and TSP is if we ever see a scenario in which autonomous ridesharing begins displacing SOVs and conventional transit in congested metro areas, bus lanes and TSP could gradually be repurposed for optimized autonomous rideshare corridors that bypass the human-operated traffic in the transition period in which human-operated and autonomous traffic will coexist. We’ve seen how the valuable infrastructure of obsolete transportation corridors – reused bridges, rails-to-trails, etc. – was repurposed for the next transport technology iteration, so maybe the same could be done with bus infrastructure, especially if we see a future in which “natural monopoly” ridesharing *becomes* the next iteration of transit by inevitable evolving (devolving?) into a regulated utility or government-operated entity like so many other private infrastructure/transport ventures have evolved into.
In any case, it seems astonishingly premature to divest in transit improvements if we don’t yet know if/how autonomous vehicles will scale up to function. The blustery, overconfident internet futurists come off as the old PRT crowd in the face of so many unknowns. In the meantime, transit agencies are speculating over the opportunities AVs could allow: something as unexpected as offloading paratransit onto AVs could in turn allow an incredible amount of currently-diverted resources to be put into boosting the frequencies of trunk-line buses, making them even more competitive as show-up-and-go services. If that was coupled with gradual, retirement-based attrition of human-driven buses replaced with driverless buses that bypassed the inevitable congestion generated by space-inefficient single-occupancy AVs, who knows, we could see a gradual fusion of transit and ridesharing, an eventual municipalization of a future autonomized rideshare-based Uber. Who knows; I just hope my speculation wasn’t as overly-certain and blustery overconfident as the “I have been to the future and come back to tell you what will happen” nouveau-PRT crowd.
Even the Videantis graphic above is misleading – the “today in production” phrase implies that we already live in a world where you can go out and buy an autonomous vehicle anywhere and a massive pool of them is in service from which we can begin modifying the function of existing transport. But compared to the 250-million-odd conventional cars on the road in the US alone, the number of autonomous vehicles “today in production” is still insignificant. We can prophesize and plan, but I think it’s laughably premature to dismantle.
I’m talking about most urban land. Most areas in suburbs and principal cities, where most Americans live and work. There is lots of unused capacity today in these areas, even at rush hour. Congestion is mostly limited to peak travel times within the city center, or on major roads into and out of the city center. Since transit’s share of the travel market is already very small in the vast majority of cities and suburbs, only a small increase in road traffic would be required to replace it completely. How will transit survive?
And even in the densest cities like New York, at the very least transit is surely going to shrink dramatically. The New York subway currently runs 24 hours a day, 7 days a week. Why will anyone take the subway or a bus at night if they have the option of a cheap self-driving taxi/Uber ride instead? I expect overnight subway service will be dramatically reduced, or completely eliminated, pretty soon after self-driving cars become generally available in New York. As the penetration of these cars increases, demand for the subway will fall further, and service will be cut back accordingly.
Max, see these articles for a more thorough discussion on the various unknowns regarding congestion and induced demand:
https://www.seattletransitblog.com/2016/07/13/driverless-cars-wont-make-transit-obsolete/
https://cleantechnica.com/2016/01/17/autonomous-cars-likely-increase-congestion/
As described in the second article, “most urban/suburban land” is dominated by roads that aren’t actually suitable for increased capacity…
https://goo.gl/maps/ykyuqck2mRp
…Only a handful of congested arterials “in most places” are designed to accommodate through traffic, to which minor non-through roads feed. Given the diffuse, lengthy travel that this hierarchical road pattern has induced, congestion no longer follows the limited linear congestion of the old east coast “into downtown at 9, out of downtown at 5” pattern. I’m amazed at how often I’ve been in congestion on suburban arterials at 8pm on a Sunday. I suspect that, like me, everyone else was driving five miles to buy a tube of toothpaste because the transport arrangement made that convenience possible for us. Even “small increases” in road capacity are dubious due to various unknowns over induced travel related to deadheading, spacing and chaining complications undermined by human interference in transition periods, etc. There’s a lot that’s hard to predict.
Additionally, the “death of off-peak transit” notion assumes that off-peak ridesharing can be scaled up as cost-effective. I was surprised to learn how cheap late-night bus service can be due to its infrequency. A driver operating a bus only a couple of times an hour late at night may not necessarily be more expensive (assuming the bus itself doesn’t go driverless) than maintaining/operating/fueling a large enough fleet of autonomous rideshares that would need to offer service more frequently than the bus to be competitive. It remains to be seen if an AV ridesharing company deems it profitable enough to offer enough AVs on the road at 1am such that I can summon one and expect it to show up within 20 minutes (comparable to late-night NYC subway service assuming the full, not average, wait time). Often late-night service by private companies is just as or even more limited than transit service, not because driver costs are too expensive, but because the private company only wants to focus on peak or “surge” markets. Off-peak AV service might still be of marginal financial viability, perhaps even such that transit has to step in to subsidize or even operate off-peak ridesharing.
This is all very intriguing speculation!
I still don’t understand where you think this huge increase in demand in dense urban areas, to consume all the additional capacity created by self-driving cars, is going to come from — other than from transit users switching to self-driving cars. Population is limited. The amount of time and money people are willing and able to devote to travel is limited. You cannot make meaningful predictions about the effect of self-driving cars on demand from past experience of induced demand from new road construction. Road capacity isn’t expanded at random. It’s expanded in places where demand is expected to increase due to population growth or new development. Self-driving cars, in contrast, will expand road capacity everywhere.
And I don’t see any remotely plausible scenario where off-peak transit would be economically competitive with self-driving Uber/taxis — let alone competitive on travel time, convenience, comfort and privacy. Transit costs about $1 per passenger-mile on average. Off-peak transit is even more expensive than that, because off-peak buses and trains tend to have fewer passengers (so the cost per passenger is higher, and fare revenues are lower).
The latest from Uber: Flying cars (actually helicopters):
http://www.sfgate.com/business/article/Uber-sees-future-of-flying-cars-zooming-over-10417167.php
Well, this item sure prompted a deluge of comment in a hurry, so here is another (long) one.
Amidst the current public and media frenzy over autonomous cars (and buses), it is worth dipping into the world of urban rail automation to look at its evolution over the decades. (Disclosure: Having worked for the automated Vancouver SkyTrain system for more than 30 years, I come at this issue with my own perspective and biases. Agree or disagree as you see fit, but ponder the implications and questions beneath the superficial similarities and differences.)
Rail automation isn’t new. It can be traced to the 19th century with mechanisms to keep trains a safe distance apart, since railways, and subways (in contrast to streetcars), typically operate at speeds, and/or with restricted vision (e.g., in tunnels) way beyond a line-of-sight stopping distance. And the rails, which keep trains on course, prevent them from dodging an obstacle as a car or bus can. Train collisions have always been a bad thing. From simple manual procedures (train orders, tokens, etc.) mechanical, electrical and electronic technology was developed to become ever-more reliable, fail-safe, and to overcome human error.
Automatic Train Operation (ATO) is a more recent development (London Victoria Line 1968, PATCO in suburban Philadelphia 1969, BART 1972, and others) but for a long time, transit systems continued to employ a driver on every train for door closing, train departure, visual monitoring, and backup to automation.
While unattended automated trains were implemented in some airports, universities and urban shuttles going back to the 1970’s, SkyTrain in Vancouver (as Jarrett pointed out) was the first large city urban metro to operate in UTO (Unattended Train Operation) mode, opening in 1986. The combined Expo/Millennium/Canada Lines now carry more than 120 million passengers a year in UTO mode
There has been an accelerating adoption of Unattended Train Operation (UTO) around the world, as documented by the UITP at http://www.metroautomation.org: 55 fully automated (unattended train) metro lines, totaling 803 km, in 37 cities around the world, as of July 2016, with a projection that it could reach more than 2,300 km by 2025.
There are big differences between (restricted) rail and (public) road environments, so direct comparisons can be dodgy, but it is worth considering some of the deeper questions beneath the superficial similarities and differences.
* With railway tracks, steering of trains isn’t an issue. Managing a precision road vehicle trajectory over a wide street is a bigger challenge, although already developed to a high degree, but with some limits on encounters with the unexpected. What will be “good enough”?
* There are finite points of rail route intersections (track crossovers and switches). Autonomous road vehicles on public streets are faced with potential conflicts from any direction, anywhere, anytime.
* Thus far, UTO rail systems are running within protected rights-of-way (tunnel, elevated or fenced), to eliminate pedestrian and other vehicle conflict. Platforms typically have either intrusion detection systems (usually linked to the ATC system) or platform doors to provide a physical barrier. This takes it to a generally accepted level of public protection. (People can still find a way to intrude, just as they can step into oncoming traffic on a public street, or scale a fence around a power substation, or jump/fall off a pier. There is no absolute protection of a human being short of incarceration.) Fully autonomous road vehicles still require a very big leap of public faith and legal precedent. Maybe autonomous cars would achieve a lower overall accident rate, but that won’t easily resolve the issue of responsibility for any accidents that do happen, which might or might not have been prevented in a conventional environment.
* The various competing ATC systems so far employ a hierarchy of control, such that a specific subsystem or level is responsible for ensuring an overall safe separation and routing of trains, even when some logic is decentralized to onboard systems. How will an “every machine for itself” architecture work on a large scale, over long periods of time? Cities now paint lines on streets, place visual speed and traffic restriction signs, and maintain visual traffic lights. Will this suffice for autonomous vehicles, or will cities need to adapt, install and maintain (at considerable expense?) new layers of machine-readable instructions?
* Operational rail rapid transit systems are under identifiable and responsible organizations, generally with levels of government safety oversight and audit. Who becomes responsible for the integrity of all the inevitably different autonomous systems that could end up interacting with each other. (Will Seattle’s cars be compatible in Vancouver, and vice versa?)
* Rolling stock, track and systems are maintained by specifically trained staff, again with agency traceability. (Yes, there can be gaps and shortfalls, which then provoke public outcry and a scrambling reaction.) Shoddy maintenance of private cars is currently a factor in some road accidents, although the basic mechanisms of steering and brakes are pretty reliable, so motorists can usually (not always) bring a vehicle to a stop when something goes wrong. This could get a lot more complex in an inevitably software-based environment. And that begs issues of software version integrity, upgrades, and security. A hacked “smart toaster” is one thing; cyber security concerns about safety-critical systems is a big concern not to be dismissed lightly. It is one of the key ongoing considerations in current ATC technology, but is a bigger challenge in an open public environment.
* Metro systems which have moved to UTO have recognized that basic train safety (collision avoidance, track switch alignment, speed control, door operation, etc.) are now most safety handled through automation, leaving a human operator with a diminished role, essentially watching a machine drive itself, waiting for the rare and unexpected moment of rapid and precise intervention. This is essentially equivalent to the autonomous vehicle Level 3 (vehicle drives itself, but driver must remain ready to regain control). It is arguably not the way a human being works best, even if paid to do so. This has been recognized as a potential sticking point for the evolution of autonomous road vehicles. In rail UTO, this level has been superseded, with operating staff redeployed in different ways to assist passengers, and maintain overall service through proactive (preventive) and reactive (failure response) processes. What will be required of autonomous car passengers? Who will come (and how quickly) to the rescue when something fails?
* The long-held goal of long distance fail-safe rail interoperability is finally emerging — European Train Control System (ETCS) in Europe; Positive Train Control (PTC) in North America; both of which have taken more than two decades, and billions of dollars, to reach partial (and continuing) implementation. Perhaps “autonomous” vehicles (by the very definition) will avoid the long path of centralized control systems, but I suspect there is a lot more required to get from the “prototype works pretty well” stage to the “bet your life” large scale maturity. The devil is in the details.
Unlike the mad rush over automobile automation, railway developments are usually slow (often painfully so), because the consequences of disasters are well understood, although the overall safety record is already far superior to road transport. Even modern Communications Based Train Control (CTBC), and a good deal of aerospace, sometimes seems to be based on the “leading edge of obsolete technology” because of the need for painstaking analysis and proof. The safety-critical layers of train control do not depend on Windows or iOS.
Autonomous vehicle technology does have some very interesting foreseeable possibilities for segregated BRT. As for rail UTO, unchaining the driver from the cab can facilitate more frequent (and therefore more attractive) transit service, especially non-peak, without an increased number of staff; therefore at a lower marginal cost.
Autonomous operation within transit yards could also have some benefit, eliminating some of the manual bus hostling costs, time and inefficiencies. Again, this is not fundamentally about reducing staff – rather, a chance to refocus staff on passenger service in ways which will significantly increase transit’s attractiveness, effectiveness, and overall scale of operation.
Lots of other issues, including potential monopoly concentration (and we used to think that GM, Ford and Chrysler had a stranglehold on society!), as covered in other blog posts and comments. The challenge for both the proponents and the skeptics is to sift through the pros, cons, and significant uncertainties, before plunging too quickly into a future that may not look quite as rosy as the Jetsons had envisioned.
Great article. One thing that doesn’t get much discussion is the value of remote control in all of this. When automated vehicles fail, they often just shut down. I would also assume they have levels of comfort, not unlike a grammar checker. These are things that don’t happen all the time, but often enough to cause problems. Getting to 99.9999% versus getting to 99.99% reliability is extremely difficult. But if an automated bus gets nervous once a day, or freaks out completely once a month, then a trained, remote technician can handle the problem and drive the thing.
This is technology that scales, not unlike self checkout supermarket lines. The checker is still there, but she manages a dozen checkout lines. In the case of a fleet of buses, this means a room full of operators ready to deal with hundreds of buses at one time. The boredom followed by panic is much less of a problem — remote operators expect to deal with a problem regularly (probably as part of a team). (It actually sounds like an interesting job).
This also solves other concerns, like security. Bus drivers shouldn’t have to act as security guards, but they often do. Not only for fare enforcement, but to break up fights or just deal with junk left behind. With monitors, these problems are minimized. Everything is caught on camera, and the police can be notified of very bad behavior (which is really all that most security guards do). The little stuff is also caught on camera, and the agency responds appropriately (if the number 12 bus has had a bunch of fare invaders, then send the transit cops there).
As for taxi cabs versus public transit, there are similarities. Both benefit greatly from automation, and will be a lot more common in the future. But taxi-cabs don’t scale. They have been heavily regulated in the past for this very reason. You don’t want to clog the downtown streets with them. Plus transit infrastructure exists already for most high demand corridors, and even great cab service won’t change that. It would be silly to replace a subway line with a bunch of cabs — even allowing carpools on bus lanes is questionable at some point.
Where it gets tricky is with the low demand area. These are areas where buses now travel infrequently and the space taken up by a cabs, carpools or buses don’t matter as much. Automation could change that. But cabs serving one ride will still be relatively expensive. I doubt that transit agencies will pay for that, which means you are the mercy of whatever companies decide to charge. There really are a couple logical options — instant car pooling or fixed bus routes.
What is interesting to me is that instant car pooling tends to gravitate towards a fixed route grid. For example, let’s say a public agency decides to replace buses that run every half hour buses with a bunch of on demand, shared vans. From high demand to low demand areas, the wait time is minimal. It solves the “last mile” problem quite well. But it still isn’t perfect. It becomes similar to airport shuttles. If you are the first stop, then it is great — but folks on the other end of the line get a very round about route home. It isn’t the number of stops, but the route that costs you time. Instead of going on 15th the whole way, the bus goes on 5th, then cuts over to 25th for a while, then back to 15th to drop you off.
But that was early on. As time goes on, and more people ride the system (and more vans are added) the system gets smarter. Now it just goes down 15th. In short, the more people use the system, the more it starts to resemble a grid. A fixed route, fixed time, gridded system makes sense once you have enough people using it.
With automation, you have a much better chance of achieving that goal. Either way you have to pay for a fleet of vans, the question is whether you can buy and service enough of them to provide a decent grid. For huge parts of the country, the answer is yes. There are plenty of midsize cities that don’t have anything resembling a decent grid with frequency service — but they could if they increased the fleet (while probably decreasing the amount spent on maintenance).
Thus I see this making a huge difference in transit. For very low demand areas, folks have a great alternative to using their car (a paratransit system). For medium density areas, they transition away from non-gridded or poor headway systems to something a lot more useful.