Antonio Loro is an urban planner with a particular interest in transportation innovations. In research conducted for TransLink and Metrolinx, he investigated the potential impacts of vehicle automation technologies. The views expressed in this article are those of the author and do not necessarily represent the views of, and should not be attributed to, TransLink or Metrolinx.
 Vehicle automation is increasingly showing up on the radar of urban planning and transportation planning professionals. Technologies are developing rapidly, and some news stories report that fully self-driving cars are just a few years away. It’s tempting to envision automation ushering in a bold new era in urban transportation, where driverless cars whisk passengers between destinations safely and conveniently, use roads with great efficiency, and make public transit as we know it obsolete.
Vehicle automation is increasingly showing up on the radar of urban planning and transportation planning professionals. Technologies are developing rapidly, and some news stories report that fully self-driving cars are just a few years away. It’s tempting to envision automation ushering in a bold new era in urban transportation, where driverless cars whisk passengers between destinations safely and conveniently, use roads with great efficiency, and make public transit as we know it obsolete.
However, a closer look at vehicle automation reveals a more nuanced picture of the future. Automation capable of replacing human drivers in any situation may be many years away from the market. The traffic flow improvements enabled by automation will be limited in several ways. Buses and other forms of public transit will still be needed to efficiently move large numbers of travelers around cities. And various forms of automation in buses could enable major improvements in service.
The last two points have come up on this blog before (here, here and here), but since there are a variety of opinions on the implications of automation for transit, it’s useful to dig a bit deeper into these issues and take a critical look at when various forms of automation will arrive, how automation will affect traffic flow, and how it will affect travel behaviour. This post will delve into those questions to shed a bit more light on what automation means for the future of public transit.
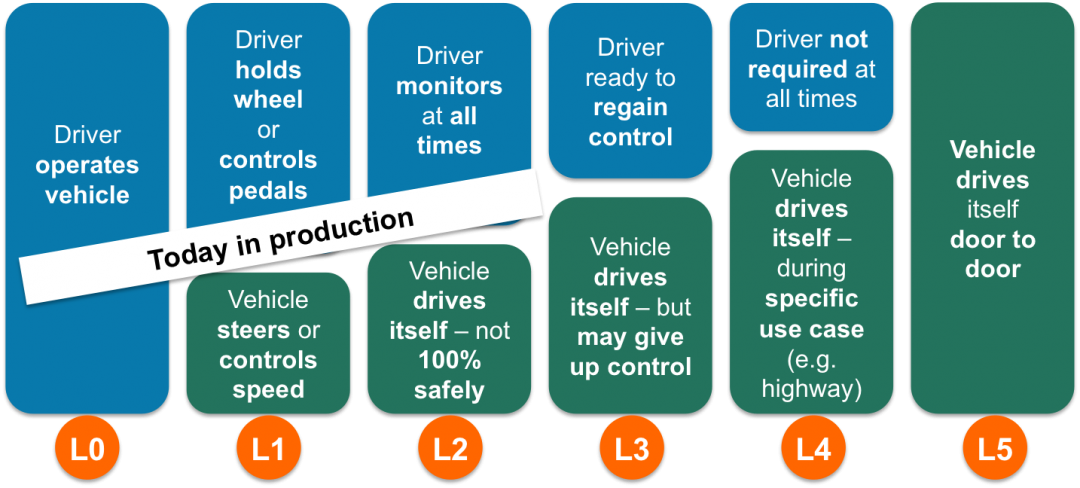
According to some, vehicles that can drive themselves anywhere, anytime, without any human intervention – described as “Level 4” vehicles by the National Highway Traffic Safety Administration (NHTSA) – are just around the corner. In 2012, Google co-founder Sergey Brin said of their famous self-driving car: “you can count on one hand the number of years until ordinary people can experience this.” Many others have made bullish predictions. For example, the market research firm ABI Research foresees Level 4 cars on the roads by around 2020, and panelists at the Society of Automotive Engineers (SAE) 2013 World Congress predicted arrival between 2020 and 2025.
On the other hand, some point to a number of challenges that suggest Level 4 will emerge further down the road, perhaps not for several decades. Steven Shladover of the California Partners for Advanced Transportation Technology, a leading expert on vehicle automation, argues that Level 4 will be much more technically difficult to achieve than many optimists acknowledge (see Vol. 7, No. 3 here). According to Shladover, huge advances in technology would be needed to progress to systems capable of driving safely in the vast range of complex and unpredictable situations that arise on roads. In addition, such systems would have to be far more reliable than products like laptops or mobile phones, and extensive – and expensive – testing will be needed to prove reliability. While Google’s vehicles have driven long distances in testing – over 500,000 miles as of late 2013 – and have not caused any crashes while in automated mode, Shladover points out that this proves very little because their vehicles are monitored by drivers who take over when risky or challenging situations arise.
Legal and liability issues could also delay the emergence of Level 4 vehicles. A few American jurisdictions now explicitly allow automated vehicles on public roads for testing, and Bryant Walker Smith, a leading authority on the legal dimensions of vehicle automation, has found that automated vehicles are “probably” legal in the US; however, he also cautions that their adoption may be slowed by current laws. Laws will have to be clarified before Level 4 vehicles hit the mass market in the US and in other countries. Liability for crashes could also be a thorny question. If a human isn’t driving, presumably blame would shift to the manufacturer, or perhaps a supplier of system components, or a computer programmer. Resolving these issues could stall the emergence of automation.
While there is dispute as to when Level 4 vehicles will be on the road, most in the field agree that more limited forms of automation are coming soon. Some are already here. For example, Mercedes S-Class vehicles can simultaneously control speed and steering when road and traffic conditions allow, though the driver must continuously monitor the road. This is just shy of “Level 2” automation, since Mercedes’ system also requires the driver to keep their hands on the wheel. Numerous other vehicle manufacturers are developing advanced technologies that promise to take over driving duties, at least some of the time, on some roads. As technologies advance, “Level 3” vehicles could be on the market by 2020 to 2025, according to most experts. These vehicles would allow drivers to forget about monitoring the road and instead read or watch a movie, with the caveat that when the automated system is out of its depth, it would ask the driver to take over. (The takeover time is a matter of debate – anywhere from several seconds to several minutes has been suggested.)
Automation could be a boon for safety – or it could create new problems. On the plus side, it appears that crash avoidance systems already on the market may be effective. Of course, as machines take over more of the responsibility of driving, safety will only improve if the machines are in fact less fallible than humans. This might seem an easy task, considering the foibles of humans, but it’s worth remembering that some automation experts believe otherwise. And where driving is shared between human and machine, the safety impacts are especially open to question. A driver in a Level 2 vehicle might fail to continuously monitor the road, or a driver in a Level 3 vehicle could be engrossed in their movie and fail to take over control quickly enough when requested. In either case, automation could actually decrease safety.
After safety, one of the biggest selling points of vehicle automation is its potential for improving traffic flow, especially through increased road capacity. With their slow reaction times, human drivers can’t safely follow other vehicles closely, so even at maximum capacity, around 90 percent of the length of a freeway lane is empty. If machines could react quickly enough, road capacity would increase enormously. Some studies appear to suggest huge increases are in fact possible – for example, one study estimates that capacity would almost quadruple, and another finds quintupled capacity. However, their calculations consider endless streams of densely-packed vehicles. More realistic estimates assume that several vehicles, say four to twenty, would follow each other in tightly packed groups or “platoons”, with each group separated from the next by a large gap. These interplatoon gaps would provide safety and allow vehicles to change lanes and enter and exit the freeway. Studies that account for these gaps estimate that automation would increase capacity in the range of 50 to 100 percent (for examples, see here and here).
While the more realistic estimates of capacity increases are still very impressive, there are a number of caveats. First, short headways are possible only when automated vehicles are equipped with V2V, or vehicle-to-vehicle communication. Vehicles that rely completely on on-board sensors – such as the Google self-driving car, in its current form – cannot react quickly enough to the movements of other vehicles, so they would enable relatively small capacity increases. A second caveat: large capacity increases would come only when automated cars dominate the road. Studies have found that when fewer than 30 to 40 percent of vehicles on the road are capable of platooning, there would be little effect on capacity, and large increases would come only after the proportion of equipped vehicles exceeds 60 to 85 percent (e.g., see here). This is important, since new vehicle technologies will take some time to become commonplace. Imagine that as soon as automated vehicles hit the market, every new vehicle purchased is automated: it would then take two decades for automated vehicles to account for around 90 percent of vehicles on the road. If the rate of adoption is more realistic, but still rapid, it would take three decades or more before automated vehicles make possible large road capacity increases. A third major caveat: platooning is only feasible on freeways. Changing lanes, stopping at red lights, making left turns, parallel parking, stopping for pedestrians – such manoeuvres would make platooning impractical on city streets.
For city streets, however, there is the prospect of using automation to improve flows at intersections by coordinating vehicle movements. A good example is the “reservation-based” intersection, where there are no stop lights or stop signs – instead, cars equipped with V2I (vehicle-to-infrastructure communications) technology “call ahead” to a roadside computer that orchestrates the movements of vehicles and assigns time and space slots for vehicles to cross the intersection. Simulations show such an intersection could move almost as much vehicle traffic as an overpass – but so far, simulations haven’t included pedestrians and cyclists. Accommodating these road users in a reservation-based intersection would require signals with sufficiently long cycles, so capacity increases would be limited.
Vehicle automation would also bring a very direct impact: reduced or eliminated labour in driving. Time spent traveling in Level 2 vehicles could be less stressful, and could become more productive and enjoyable in Level 3 and especially in Level 4 vehicles. Profound changes in travel behaviour would result. As people increasingly let their robot chauffeurs deal with road congestion and other hassles of driving, travel by motor vehicle would become more attractive. Trips would tend to be longer and more frequent and travel at peak times would increase. Trip routes would also tend to make greater use of freeways with Level 2 and 3 vehicles, since it is primarily on these roads that the vehicles will be able to operate in automated mode.
These induced demand effects would tend to increase road congestion. Freeways would be the exception – if platooning-capable technology becomes widespread, freeway capacity would increase and congestion would drop. That is, until the surplus capacity is taken up by the “triple convergence” of mode shifts, route changes, and change of time of day of travel. However, the increase in freeway traffic would be constrained by capacity limitations on the rest of the road network – as freeway travel increases, new bottlenecks would form on streets near freeway entrances and exits, where automation does not boost capacity, thus restricting the volume of traffic that can access the freeway.
The upshot of the above observations on the capacity effects of automation is that even when the potential freeway capacity increases enabled by platooning are fully realized, automated cars would nevertheless be able to carry far fewer people than bus or rail on a given right-of-way. And, as mentioned, capacities on streets will be largely unaffected. Because the capacity improvements made possible by automation would be limited, we will still need buses and trains when space is in short supply and we need to transport large numbers of people. Larger vehicles will still fit a lot more people into a given length and width of right-of-way than platoons of small vehicles will be able to carry. As Jarrett would say, it’s a simple fact of geometry.
So, vehicle automation will not render large transit vehicles obsolete. On the contrary, it could enable significant improvements in bus service and increases in ridership. Automated steering enables bus operation at speed in narrow busways, which reduces infrastructure and land costs. It also enables precise docking at passenger platforms, which improves passenger accessibility and reduces dwell times. Automated control of speed enables bus platooning, allowing buses to effectively act like trains. Automation can be taken further yet: a driver in a lead bus can lead a platoon of driverless buses, thus providing high capacity with low labour costs. Similarly, individual buses or platoons can operate driverlessly, thus enabling increased frequency with low labour costs. “Dual mode” operation is also possible: imagine a busway where chains of buses leave the city running like a train until they separate at a suburban station, where drivers board and take them onward onto various local routings.
Some of these forms of automation have already been implemented in BRT systems. For example, a system in Las Vegas employed optical sensors to enable precise docking at passenger platforms, BRT buses in Eugene, Oregon used magnetic guidance to facilitate precision docking and lane-keeping in a pilot project, and systems in Paris and Rouen, France, and in Eindhoven, the Netherlands, use various types of guidance systems. While bus platooning and driverless operation have not been deployed so far, these applications could be achieved given sufficient technological advances – or by using a low-tech shortcut. The simple solution is to keep other vehicles or humans out of the way of the automated bus. If buses operate on busways with adequate protection, platooning and driverless operation is possible with existing technology. (Similarly, current driverless train systems are able to operate driverlessly, even with decades-old technology, by virtue of the well-protected guideways they run on.) Developing a vehicle capable of driving itself in the simplified environment of a protected busway is a considerably easier task than developing a vehicle that can drive itself on any road, anytime.
With the arrival of Level 4 automation, driverless buses could operate on the general road network. This would make it possible to operate smaller buses at higher frequencies, since labour costs would no longer constrain frequency. If you shrink driverless buses small enough – and provide demand-responsive service for individual travelers – you end up with driverless taxis. This points to the possibility that public transit service may be more efficiently provided by driverless taxis (or driverless share taxis) in low-density areas, thereby replacing the most unproductive bus services and improving transit productivity overall. (Of course, while automation could boost productivity, even driverless demand-responsive service would still have low productivity where densities are low.)
While it’s a seductive story that driverless cars will transport us to a realm of much improved safety, convenience, and efficient road use – and where public transit has dwindled away – the future is likely to be more complicated. Advanced automation is indeed coming soon, though we might not see Level 4 technologies for a while. Automation could improve safety, though it could also generate new problems. It could also improve road capacity, but the improvements would be limited in several ways. All this suggests that we needn’t worry about (or celebrate) how vehicle automation will make public transit obsolete. Instead, let’s focus on how to use automation to the advantage of public transit.